- 製品 製品ロケーションサービス
ジオフェンスからカスタム ルート検索まで、ロケーションに関する複雑な課題を解決します
プラットフォームロケーションを中心としたソリューションの構築、データ交換、可視化を実現するクラウド環境
トラッキングとポジショニング屋内または屋外での人やデバイスの高速かつ正確なトラッキングとポジショニング
API および SDK使いやすく、拡張性が高く、柔軟性に優れたツールで迅速に作業を開始できます
開発者エコシステムお気に入りの開発者プラットフォーム エコシステムでロケーションサービスにアクセスできます
- ドキュメント ドキュメント概要 概要サービス サービスアプリケーション アプリケーションSDKおよび開発ツール SDKおよび開発ツールコンテンツ コンテンツHERE Studio HERE StudioHERE Workspace HERE WorkspaceHERE Marketplace HERE Marketplaceプラットフォーム基盤とポリシーに関するドキュメントプラットフォーム基盤とポリシーに関するドキュメント
- 価格
- リソース リソースチュートリアル チュートリアル例 例ブログとリリースの公開 ブログとリリースの公開変更履歴 変更履歴開発者向けニュースレター 開発者向けニュースレターナレッジベース ナレッジベースフィーチャー 一覧フィーチャー 一覧サポートプラン サポートプランシステムステータス システムステータスロケーションサービスのカバレッジ情報ロケーションサービスのカバレッジ情報学習向けのサンプルマップデータ学習向けのサンプルマップデータ
- ヘルプ
GPS
デジタル地図を利用するには、道路、車線、道路標識などの関連する物体を地球上で正確に地理位置合わせする必要があります。 地球測位システム (GPS) やその他の衛星測位システムでは、地球の不規則な形状や、重力が通過する速度に与える影響を考慮しながら、優れた精度を実現しています。 HERE では、このような理由から GPS を幅広く利用しています。
GPS は、軌道上にある 24 機以上の衛星と、車や航空機など地上またはその近くにある多数の受信機で構成されています。 各衛星は現在の位置と時間を非常に正確に把握し、この情報を受信機に送信します。 衛星は、互いに同期された精密な原子時計と地上の時計を使用して、この精度を達成しています。
衛星から受信機への信号の送信にかかる時間を測定することで、電波の速度が正確に把握され、信号の遅延時間に比例するため、 2 つの信号間の距離を測定できます。 4 つ以上の異なる衛星 ( 衛星の原子時計を基準にした受信機の時計の誤差を補正するための位置を 3 つとする ) と同じ操作を行うことで、受信機の位置を 3D 空間で三角測量し、有効な座標に変換することができます。 緯度 、経度 の極座標、平均海面に対する標高など。
実際には、このプロセスは音よりも複雑です。 アインシュタインの相対性理論では、時間そのものがさまざまな場所の重力場の強さに応じて異なる速度で流れることが示されています。 したがって、重力の変化は、衛星から受信機への信号の送信にかかる時間に影響を与え、その結果、距離の測定に影響を与えます。 軌道上の衛星は地球の重心から離れているため、地球表面の重力場は通常軌道上の重力よりも強い。 また、受信機付近の重力は、受信機付近の受信機の高さや地球の密度 ( 均一ではありません ) によって若干異なります。
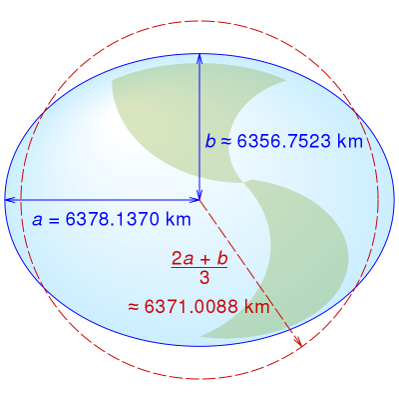
さらに、地球は完璧な球体ではありません。 地球は、「びらんスフェロイド」または「 3D 地球型楕円体」と呼ばれることもある、わずかに不規則な楕円体です。地球は主に液体のマグマで、回転するからです。この楕円体は、薄いクラストで覆われ、宇宙に浮いて、上のように回転する、熱いゼリー状の塊のようなものです。 正確に保つために、 GPS は地球の形状の不規則性、および時間の流れに対する重力の影響を考慮する必要があります。 地球の不規則な形状の詳細については、次のセクション ( 以下 ) を参照してください。
3D 測地楕円体
地球は宇宙における地球楕円体であり、完全な球体ではありません。 3D 楕円体の形状は、地球が赤道で隆起し、大小の軸を持っていることを認識します。これに対し、どこにも同じ半径の球があります。
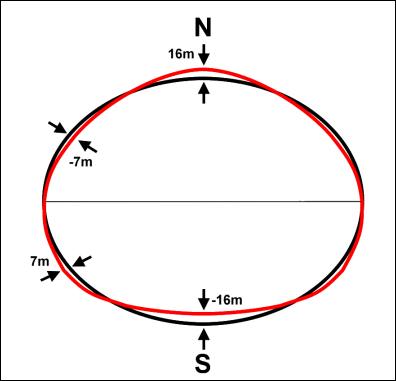
ジオイドは楕円体自体が正確ではないため、地球の形状の不規則性の多くを捉えている。 次の概念的な図では、赤い曲線は、楕円体を示す黒い曲線を基準にした、地球表面の測地的な起伏を示しています。
地球の測地楕円体は、地球の不規則な形状をモデルにした数学的投影システムによって近似できます。 いくつかの投影システムが利用できます。 HERE がマップ データ を収集する場合、エポック 2017.0 の ECEF ITRF2014 投影システムを使用します。 (ECEF は地球中心、地球固定、 ITRF は国際地上レファレンスフレーム (International Terrestrial Reference Frame) の略です ) 。 マップ データ を収集して HERE に送信するサードパーティは、別の投影法システムを使用する場合があります。 プロジェクションシステムを使用しない場合、または時間の流れにおけるエインステニアンの変化を考慮しない場合、送信時間のみを測定した場合の位置誤差は大きい(複数キロメートル)ことになります。
LiDAR およびラスタ写真からの投稿
HERE 車両は、道路を走行する際に、 LIVAR データを収集する。 Lidar は、「レーザーイメージング、検出、およびレンジング」を意味します。 GPS を使用して地理的位置を追跡する車両など、既知の場所から開始することで機能します。 その車両に設置された特殊レーザーは、特定の方向に火災を起こします。 その車両のレシーバーが、近くの物体から反射された光が戻る時間を測定し、車両と周囲の物体の間の雑音を判断できます。 結果は、正確に地理位置が設定された 3D 点クラウドで構成されます。
HERE では、レーザーレーダーを使用して道路設備 ( バリヤ、ポールなど ) および位置特定オブジェクト ( 道路標識など ) を特定して地理位置を特定し、 3D 建物のファサードを自動的にモデル化します。これにより、地図は実際の場所によく似たものになり、 POV カメラを使用したナビゲーションをサポートします。 例 :

HERE 車両は、道路を走行するときに写真 ( ラスタイメージ ) も撮影します。 通常、これらの写真は HERE マッピング製品では直接使用されませんが、間接的に使用されます。 HERE の開発者、ツール、および寄稿者は、写真を使用して、サインフェースの内容や建物のファサードのテクスチャなどを確認できます。
