- 製品 製品ロケーションサービス
ジオフェンスからカスタム ルート検索まで、ロケーションに関する複雑な課題を解決します
プラットフォームロケーションを中心としたソリューションの構築、データ交換、可視化を実現するクラウド環境
トラッキングとポジショニング屋内または屋外での人やデバイスの高速かつ正確なトラッキングとポジショニング
API および SDK使いやすく、拡張性が高く、柔軟性に優れたツールで迅速に作業を開始できます
開発者エコシステムお気に入りの開発者プラットフォーム エコシステムでロケーションサービスにアクセスできます
- ドキュメント ドキュメント概要 概要サービス サービスアプリケーション アプリケーションSDKおよび開発ツール SDKおよび開発ツールコンテンツ コンテンツHERE Studio HERE StudioHERE Workspace HERE WorkspaceHERE Marketplace HERE Marketplaceプラットフォーム基盤とポリシーに関するドキュメントプラットフォーム基盤とポリシーに関するドキュメント
- 価格
- リソース リソースチュートリアル チュートリアル例 例ブログとリリースの公開 ブログとリリースの公開変更履歴 変更履歴開発者向けニュースレター 開発者向けニュースレターナレッジベース ナレッジベースフィーチャー 一覧フィーチャー 一覧サポートプラン サポートプランシステムステータス システムステータスロケーションサービスのカバレッジ情報ロケーションサービスのカバレッジ情報学習向けのサンプルマップデータ学習向けのサンプルマップデータ
- ヘルプ
マップの基礎 : トポロジとジオメトリ
デジタルロードマップの最も基本的なコンポーネントは、道路ネットワーク を表すトポロジです。
基本的な道路モデルでは、 3 つ以上の道路が合流する交差点 ( 「ノード」と呼ばれます ) 間の線形接続を形成する道路 ( 「リンク」と呼ばれます ) で構成される単純な論理トポロジを使用します。 2D スペースで節点の地理位置が正確に設定されます。 リンク(開始、終了、および節点で出会う)は、実際の道路のカーブに沿っていない直線です。
道路モデルでは、「二価ノード」と呼ばれる特殊な種類のノードも使用されます。このノードは、交差点の間に配置して、交差点間の制限速度の変更などの属性の変更をサポートできます。 二価ノードは、 2 つのリンクを正確に接続します。 同様に、リンクに沿って地理位置が設定された「シェイプポイント」を使用することで、道路曲線の形状を「ポリライン 」と呼ばれる一連の接続された直線セグメントで近似できます。 これらの二価の節点および形状点は道路の形状に影響を与えますが、論理トポロジの一部ではありません。
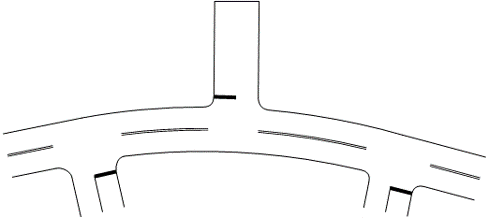
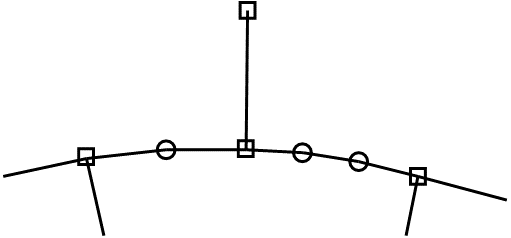
次の最初の図は、実際の道路を示しています。 次の 2 番目の図では、正方形は交差の節点です。円は交差の間のシェイプ点です。また、節点を接続する直線セグメントは、道路を表現するリンクです。
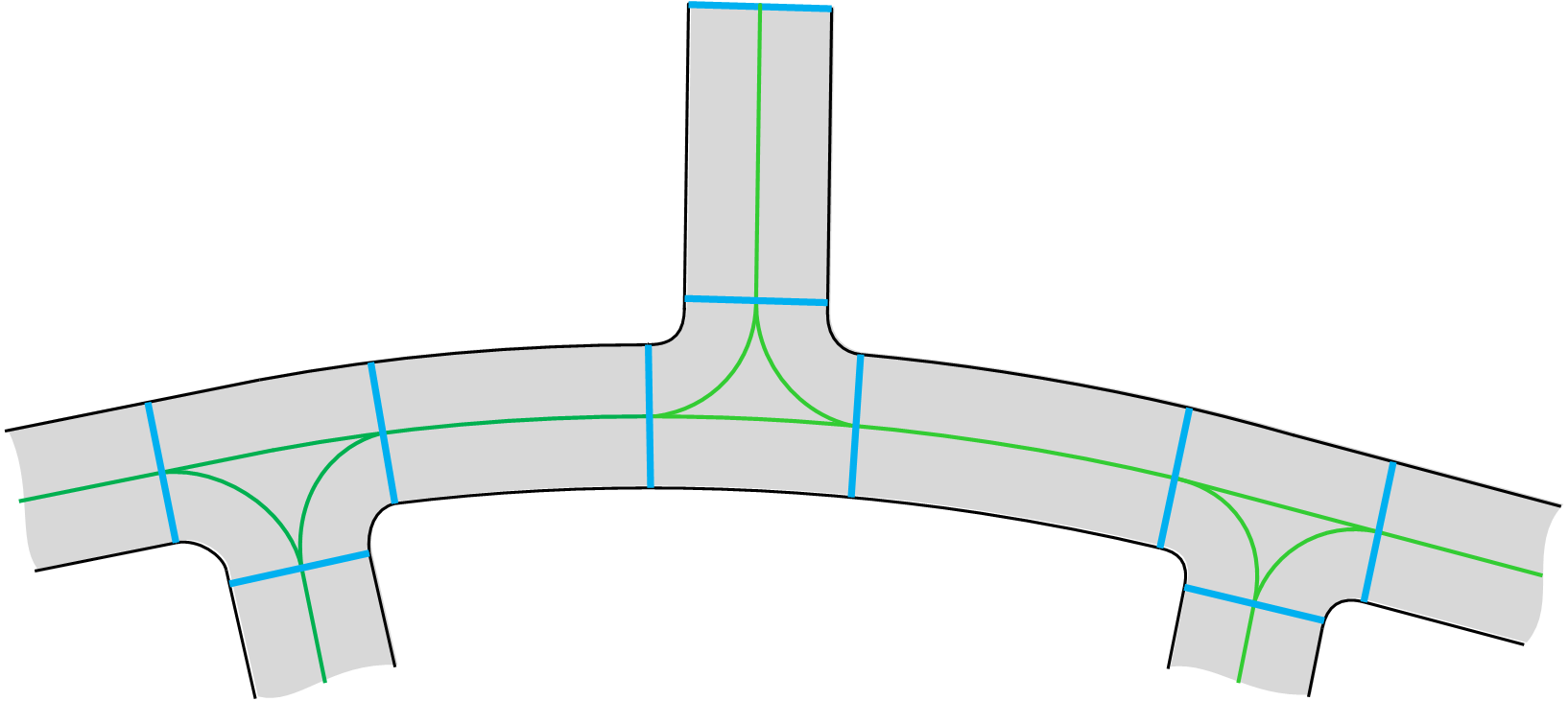
レーンモデルなどのより高度な道路モデルでは、実際の道路の 3D 曲線(標高の変更を含む)は、 3D 空間の数学的スプラインである NURBS ( Non-Uniform Rational B-Splines )によってより正確に表現されます。 NURBS を使用するサーフェスパスは、通常、道路サーフェスの中心線および車線沿いに配置されます。 パブリッシュされたマップでは、 NURBS を使用した内部の道路および車線データは、基本的な道路モデルおよびそれらに基づくナビゲーションアプリケーションとの下位互換性を保つために、通常、形状点を使用してノードおよびトポロジセグメントにテッセレートされます。
道路地図は、制限速度や移動方向などの属性をリンクに追加したり、道路標識や道路の障壁などの地理的位置にある物体を特定して位置を特定することで、さらに充実させることができます。 高度な道路モデルおよび車線モデルは、各セグメントのサブセクションに沿って適用できるパラメトリック属性をサポートしているため、これらのモデルでは二価の節点は使用されません。
湖、建物、鉄道、川、行政区画などの地図上の特徴は、ナビゲーションできないセグメントで表すことができます。 具体的には、土地利用(公園など)などの地図上の表面は、閉じたポリゴンを形成するセグメントで表されます。
要約すると、 HERE では、道路と車線のトポロジ、道路モデル、車線モデル、および位置特定モデルの属性と道路に関連付けられているオブジェクトを表すために、 3 つの主要な地図モデルが使用されます。 HERE HD Live Map は、 3 つのすべてのモデルを統合する地図製品の例です。 これらの地図モデルの詳細 については、このドキュメントの「地図モデル」の章を参照してください。