- 製品 製品ロケーションサービス
ジオフェンスからカスタム ルート検索まで、ロケーションに関する複雑な課題を解決します
プラットフォームロケーションを中心としたソリューションの構築、データ交換、可視化を実現するクラウド環境
トラッキングとポジショニング屋内または屋外での人やデバイスの高速かつ正確なトラッキングとポジショニング
API および SDK使いやすく、拡張性が高く、柔軟性に優れたツールで迅速に作業を開始できます
開発者エコシステムお気に入りの開発者プラットフォーム エコシステムでロケーションサービスにアクセスできます
- ドキュメント ドキュメント概要 概要サービス サービスアプリケーション アプリケーションSDKおよび開発ツール SDKおよび開発ツールコンテンツ コンテンツHERE Studio HERE StudioHERE Workspace HERE WorkspaceHERE Marketplace HERE Marketplaceプラットフォーム基盤とポリシーに関するドキュメントプラットフォーム基盤とポリシーに関するドキュメント
- 価格
- リソース リソースチュートリアル チュートリアル例 例ブログとリリースの公開 ブログとリリースの公開変更履歴 変更履歴開発者向けニュースレター 開発者向けニュースレターナレッジベース ナレッジベースフィーチャー 一覧フィーチャー 一覧サポートプラン サポートプランシステムステータス システムステータスロケーションサービスのカバレッジ情報ロケーションサービスのカバレッジ情報学習向けのサンプルマップデータ学習向けのサンプルマップデータ
- ヘルプ
ルーティンググラフ
パスマッチングは、ロケーション ライブラリが提供する最も重要なアルゴリズムの 1 つです。 このアルゴリズムは、道路ネットワークについての情報を頻繁に問い合わせます。 そのため、このようなリクエストに対する応答は迅速に返される必要があります。
HERE Map Content トポロジグラフ
HERE Map Content のロードトポロジおよびジオメトリ層には、グラフが保存されます。 このグラフはトポロジグラフと呼ばれ、道路ネットワークをモデル化します。 このモデルは、次の 2 種類の要素で構成されています。
- ノード はジャンクションを表します。
- セグメント は、 2 つのジャンクションを接続する道路を表します。
注
トポロジグラフを検査するに は、 Web ブラウザで https://platform.here.com/data/hrn:here:data::olp-here:rib-2/topology-geometry/inspect を開きます。
トポロジグラフの各ノードまたはセグメントには、一意の識別子があります。 ノードまたはセグメントの識別子は、対応する要素自体が変更された場合を除き、マップのバージョン間で変更されない文字列です。 HERE Map Content は、これらの識別子を使用して道路ネットワークのプロパティをノードまたはセグメントに関連付けます。 プロパティのストレージが、特定のノードまたはセグメントのプロパティを取得するように最適化されていません。特定のノードまたはセグメントのプロパティを取得するには、関連するパーティションのすべてのプロパティをスキャンする必要があります。
道路ネットワークにプロパティを添付する方法の詳細については、「 HERE Map Content トポロジアトリビューションリファレンスモデル」を参照してください
ロケーション ライブラリルーティンググラフ
ロケーション ライブラリは、別のグラフを使用して道路ネットワークをモデル化します。 このグラフは ルーティンググラフと呼ば れ、 HERE Map Content のトポロジグラフから派生します。
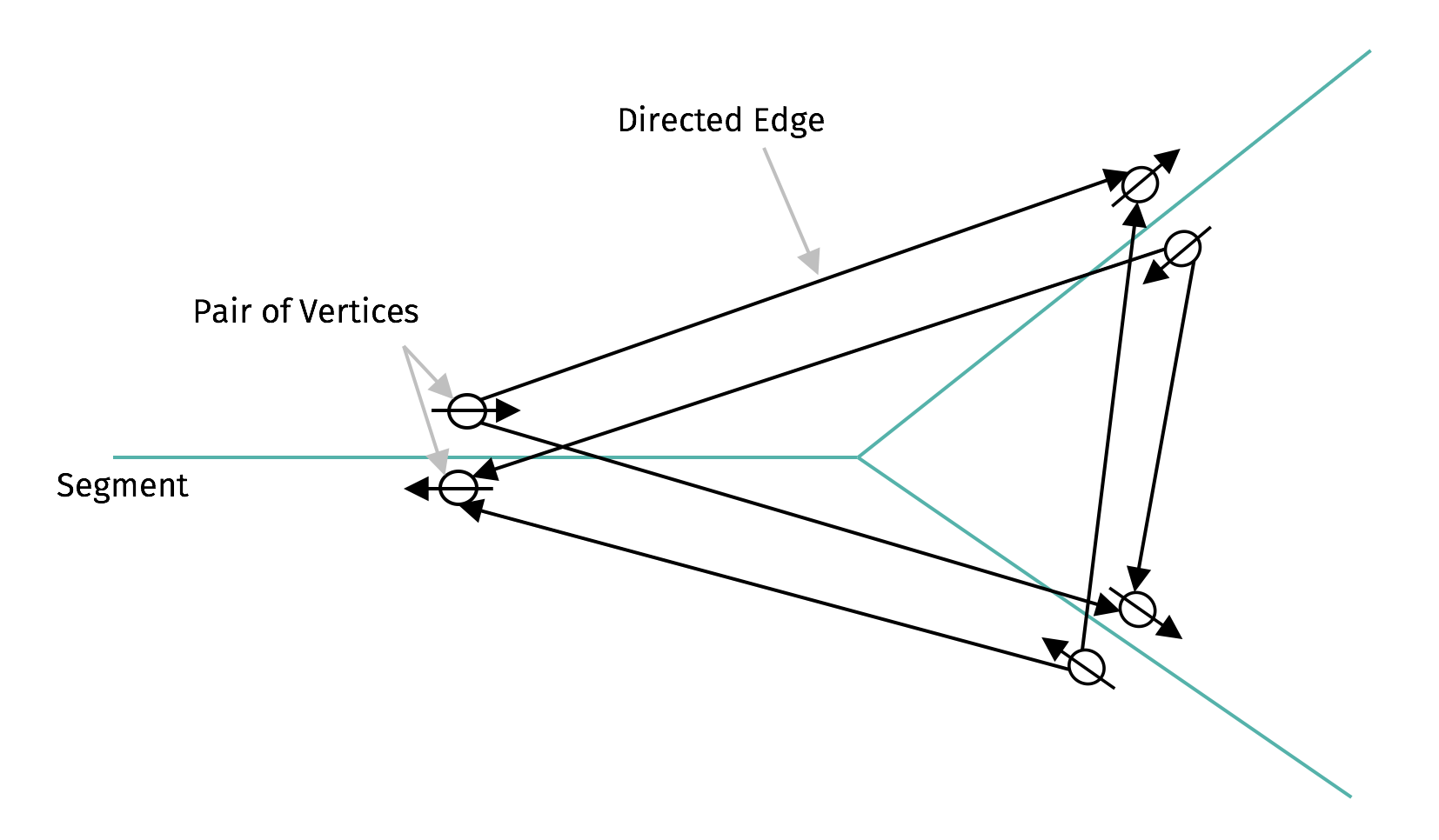
ルーティンググラフでは、次の 2 つのタイプの要素を使用して道路ネットワークをモデル化します。
- 頂点 は、道路セグメントに沿った特定の方向の移動を表します。
- エッジ は、ある頂点から別の頂点への遷移の可能性を表します。
次の図は、トポロジグラフとルーティンググラフの違いを示しています。
各頂点は、タイル ID と頂点インデックスで識別されます。 頂点インデックスは、ロケーション ライブラリが頂点のプロパティを配列に格納するために使用できる正の整数です。 配列内のプロパティへのアクセスは、 HERE Map Content パーティションよりも高速です。後者の場合、このパーティション内のすべてのプロパティのスキャンが必要になるためです。
一方、頂点のインデックスは、連続する 2 つのバージョンのマップ間で変更されることがあります。 したがって、頂点インデックスを永続的な識別子として使用しないでください。代わりに、セグメント識別子を使用してください。
ノード(トポロジグラフ)およびエッジ(ルーティンググラフ)にも、同じコメントおよび考慮事項が適用されます。 頂点およびエッジのプロパティの詳細について は、『グラフのプロパティ』を参照してください。